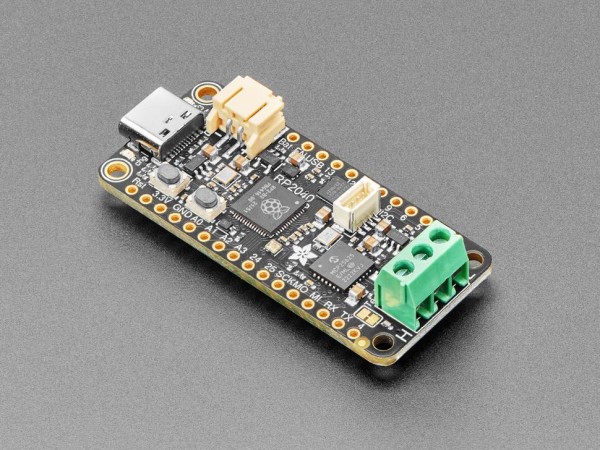
Adafruit RP2040 CAN Bus Feather mit MCP2515 CAN Controller













Cet article est indisponible actuellement
Avertissez-moi lorsque l'article sera de nouveau disponible.
20,30 € *
y compris la TVA plus expédition et manutention
L'article ne peut pas être placé dans le panier, car max. 1 Raspberry Pi par client est autorisé.








































Derniers articles consultés