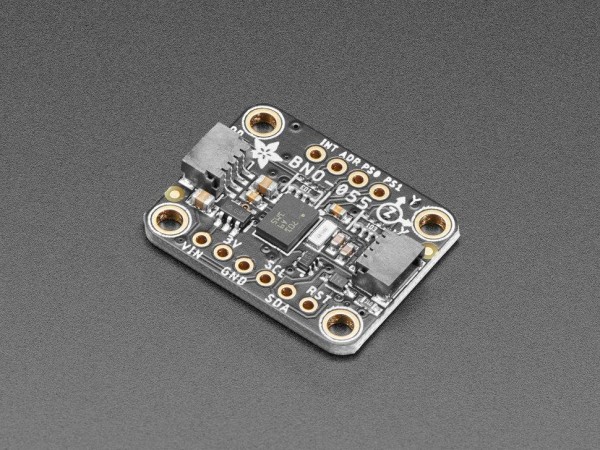
Adafruit STEMMA QT / Qwiic - 9-DOF Absolute Orientation IMU Fusion Breakout - BNO055









30,30 € *
y compris la TVA plus expédition et manutention
Disponible immédiatement
3 pièce · 1 - 3 jours ouvrés
L'article ne peut pas être placé dans le panier, car max. 1 Raspberry Pi par client est autorisé.
Attention :
Versandkostenfrei innerhalb Deutschlands
Versandkostenfrei ab 29€
Bestellungen ab 29€ Warenwert sind bei uns generell Versandkostenfrei bei Lieferung innerhalb Deutschlands.





















")











")
")





Derniers articles consultés