Aucun résultat trouvé pour le filtre !


Der myCobot Pro Vakuumsauger ist sehr effizient für schnelles und zuverlässiges Aufnehmen und Ablegen und ermöglichen es dir, einige Objekte aufzunehmen, die ein normaler Greifer nicht aufnehmen kann. So kannst du z. B. den Deckel einer flachen Schachtel abnehmen, Getränkedosen von oben anheben oder große Objekte mit einer flachen Oberfläche aufnehmen und platzieren. (Passend für myCobot 320 M5, myCobot 320 Pi, myCobot Pro 600 )
Numéro d'article: MYC-P-VACU


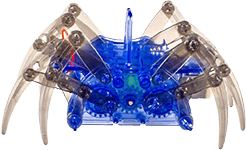
Dies ist Yuewalker, ein wendiges Raupenfahrwerk, geräuscharm und leicht zu steuern, das ein guter Partner für Ihre Panzerroboter sein könnte. Die Basis des Panzers besteht aus einer hochfesten Aluminiumlegierung und bietet ein filigranes Aussehen, höhere Stabilität und längere Haltbarkeit.
Numéro d'article: ROB0154


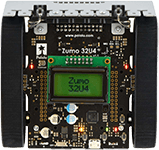
AlphaBot ist eine Entwicklungsplattform für Roboter, die mit Raspberry Pi und Arduino kompatibel ist. Sie besteht aus dem AlphaBot Mainboard, dem mobilen Chassis und allem, was du brauchst, um ihn in Bewegung zu setzen.
Du musst nur ein Controller-Board, einen Raspberry Pi oder einen Arduino anschließen und mit unserem Open-Source-Beispielcode kombinieren, dann ist alles bereit, um mit der Erkundung deines Roboters zu beginnen: Linienverfolgung, Hindernisvermeidung, Videoüberwachung, WiFi/Bluetooth/ZigBee/Infrarot-Fernsteuerung, etc.
Du musst nur ein Controller-Board, einen Raspberry Pi oder einen Arduino anschließen und mit unserem Open-Source-Beispielcode kombinieren, dann ist alles bereit, um mit der Erkundung deines Roboters zu beginnen: Linienverfolgung, Hindernisvermeidung, Videoüberwachung, WiFi/Bluetooth/ZigBee/Infrarot-Fernsteuerung, etc.
Numéro d'article: WS-12249

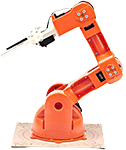
Statten Sie Ihren Raspberry Pi mit diesem 4-DOF-Metall-Roboterarm aus und beginnen Sie, die Welt der künstlichen intelligenten Robotik zu erkunden.
Dieses Starter-Roboterarm-Kit enthält: Servo-Treiber HAT, mechanische Metallarm-Struktur und 4x Metallgetriebe-Servos. Bei Verwendung mit dem Raspberry Pi ist es einfach, den Arm per Smartphone über Bluetooth oder WiFi-Verbindung zu steuern.
Dieses Starter-Roboterarm-Kit enthält: Servo-Treiber HAT, mechanische Metallarm-Struktur und 4x Metallgetriebe-Servos. Bei Verwendung mit dem Raspberry Pi ist es einfach, den Arm per Smartphone über Bluetooth oder WiFi-Verbindung zu steuern.
Numéro d'article: RPI-ROBARM
Derniers articles consultés