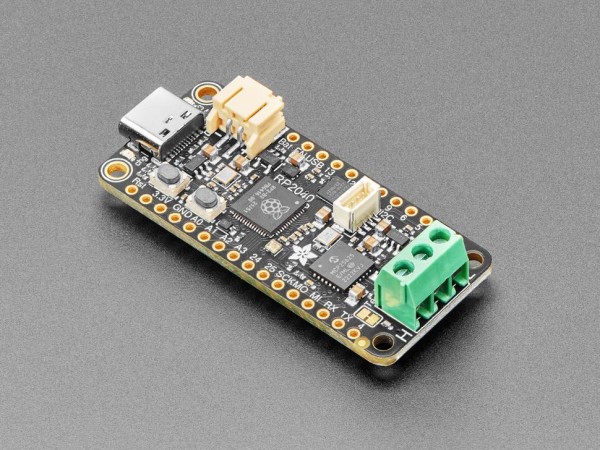
Adafruit RP2040 CAN Bus Feather mit MCP2515 CAN Controller













Dieser Artikel steht derzeit nicht zur Verfügung!
Benachrichtigen Sie mich, sobald der Artikel lieferbar ist.
20,30 €
inkl. MwSt. zzgl. Versandkosten
Der Artikel kann nicht in den Warenkorb gelegt werden, da max. 1 Raspberry Pi pro Kunde erlaubt ist.








































Zuletzt angesehen