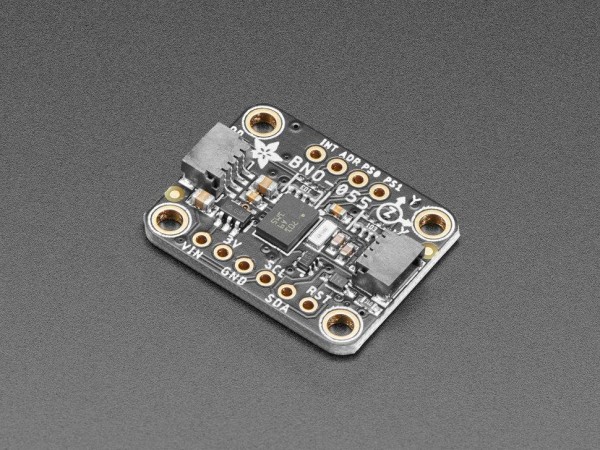
Adafruit STEMMA QT / Qwiic - 9-DOF Absolute Orientation IMU Fusion Breakout - BNO055









30,30 €
inkl. MwSt. zzgl. Versandkosten
Sofort verfügbar
33 Stück · 1 - 3 Werktage
Der Artikel kann nicht in den Warenkorb gelegt werden, da max. 1 Raspberry Pi pro Kunde erlaubt ist.
Versandkostenfrei innerhalb Deutschlands
Versandkostenfrei ab 29€
Bestellungen ab 29€ Warenwert sind bei uns generell Versandkostenfrei bei Lieferung innerhalb Deutschlands.





















")











")
")





Zuletzt angesehen